
2025年7月8日、川崎重工業の「CO-CREATION PARKKAWARUBA(カワルバ)」で「活力ある社会を創る適応自在AIロボット群 成果報告」シンポジウムが開催。ここでは、超高齢社会の課題解決を目指して開発されたAIロボット「ニンバス」の全貌が明らかにされました。
シンポジウムは2部構成。第1部では、東北大学大学院工学研究科の平田泰久教授らによる研究成果の報告に加え、川崎重工業とみずほ銀行産業調査部による発表も行われました。さらにパネルディスカッションでは、「ニンバスの社会実装に向けた未来」をテーマに意見が交わされました。第2部ではプロジェクトに参加している研究者のデモンストレーションが公開されています。「ニンバス」は、私たちの働き方や暮らしを大きく変革し、より豊かで活力ある社会の実現に貢献する可能性を秘めています。このAIロボットが、私たちの未来をどう変えていくのか、シンポジウムで語られた内容から、その姿をひも解きます。

スマーター・インクルーシブ・ソサエティに向けたニンバスの取組(平田泰久・プロジェクトマネージャー/ 東北大学大学院工学研究科教授)
平田教授が現在取り組んでいるのが、内閣府主導の「ムーンショット型研究開発制度」の一環である「ムーンショット目標3」です。プロジェクトには、多くの大学の研究室が参加しており、平田教授はプロジェクトマネージャーを務めています。このプロジェクトは、単なる技術開発ではなく、2050年の未来社会を創造するという壮大なビジョンを掲げています。アポロ計画が「月面着陸」を実現したように、社会に革新的な変化をもたらすことを目指しています。

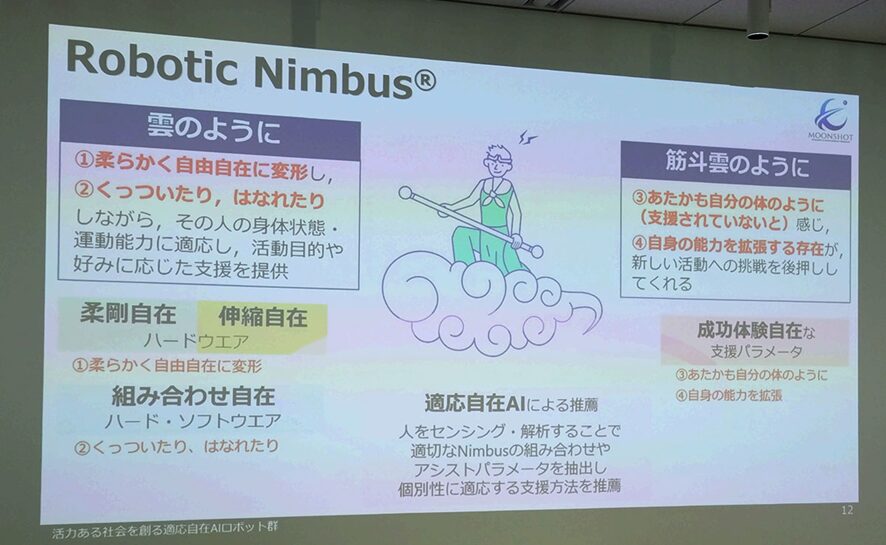
その中核を担うのがAIロボット「ニンバス」です。特定の形を持たず、名前の通り“光の雲”のように人のまわりに柔らかく存在し、状況に応じて自在に変形・分離・再結合する、そんな柔軟で適応的なロボットです。従来の「人の作業を代替する機械としてのロボット」とは異なります。
「ニンバスは人に寄り添い、支える”人間中心型”のAIロボットとして設計されています」(平田教授)
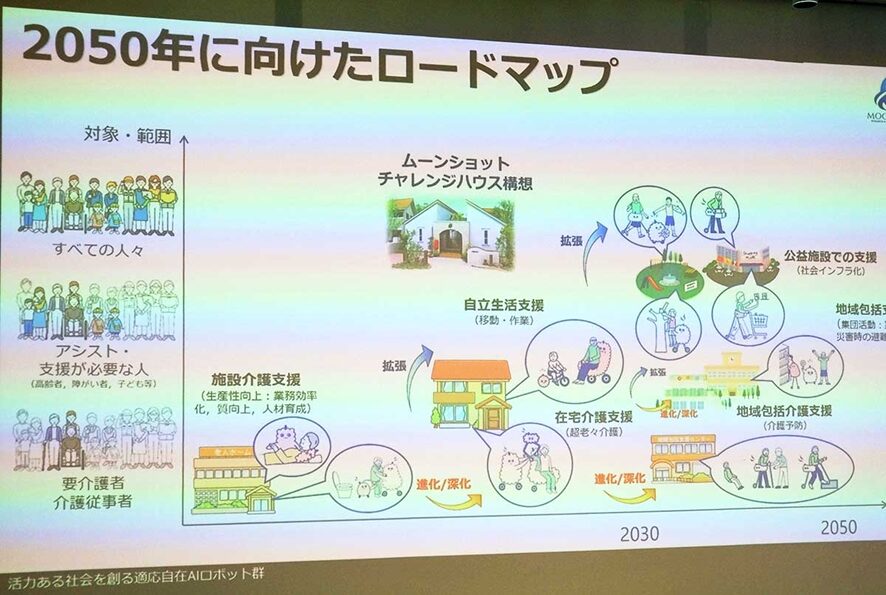
平田教授は、個人の挑戦を支え、社会参加を後押しする「スマートインクルーシブソサエティ」の実現を目指しているそうです。超高齢化に伴う医療費の増大や介護・労働力不足といった課題にも、ニンバスの支援が希望をもたらすと考えています。
「たとえば、身体機能の低下により外出をためらう人が、『迷惑をかけるかもしれない』と諦めてしまう場面でも、ニンバスがそっと背中を押すことで『やってみよう』という気持ちが生まれます。その体験が成功につながれば、『次はこれもできるかも』と、意欲が自然に広がっていく。ニンバスは、『できない』を『できる』に変え、『やりたい』を後押しする存在なのです」(平田教授)
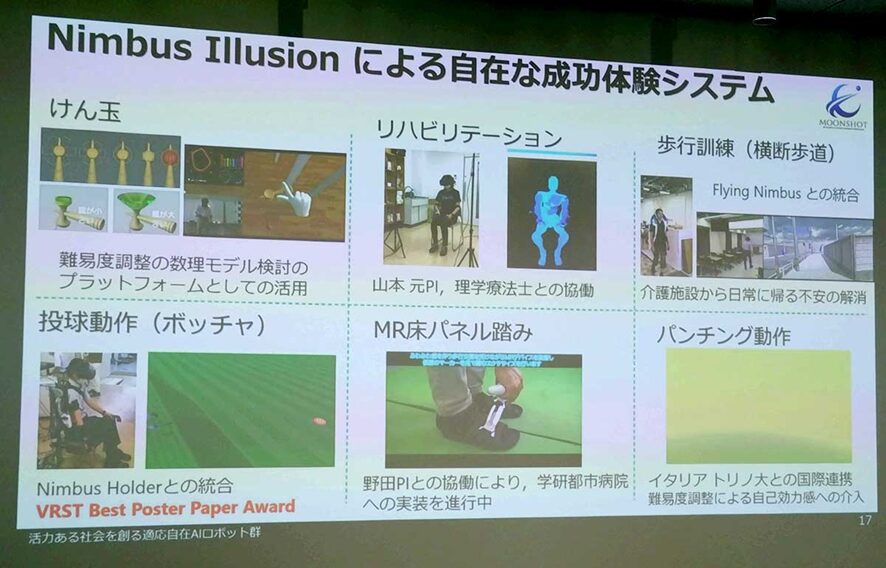
ニンバスは、人の成長段階や目的に応じて、その形や機能を変え、最適な支援を提供する、と平田教授は明かします。それぞれのニンバスは情報を共有し、その人に最適なサポートを提供するそうです。例えば、赤ちゃんを抱っこする親をサポートしたり、高齢者が立ち上がったり移動するのを助けたり、トイレや着替えをサポートしたり。また、VR(仮想現実)やMR(複合現実)技術を組み合わせることで、「まだ現実ではできないけれど、まるでできたかのように感じる」という成功体験を生み出すこともできると考えられています。
「少しずつ難易度を調整していくことで、最終的にはロボットの支援がなくても自力でできるようになることを目指しています」(平田教授)
ニンバスの社会実装に向け、重要なのが多くの研究者や企業との連携だと言います。今回のシンポジウムも、川崎重工業のカワルバを会場に、みずほ銀行産業調査部の協力を得て開催しているそうです。夢を語るだけでなく、ロボットを実際に社会にどう導入するかを共に考えたい、と平田教授は振り返ります。
現在は介護分野からプロジェクトを進めているそうですが、ニンバスの活用は介護にとどまりません。スポーツやダンスなど、社会活動への参加を後押しし、日常にワクワクをもたらす存在としての可能性も追求していると言います。
「最終的には、ニンバスが地域社会や公共施設、社会インフラの一部として誰もが使えるようになることを目指しています」(平田教授)
個人のデータを継続的に学習し、その人に最適な支援を提供するニンバス。
講演の最後に「生活を支えるだけでなく、『やってみたい』を引き出す存在として、その可能性を、皆さんと一緒に探っていければと願っています」と今後の展望について語りました。
運動の成功体験を通じた子どもの自己効力感の育成(野田智之・株式会社国際電気通信基礎技術研究所 脳情報通信総合研究所 主幹研究員)
国際電気通信基礎技術研究所(ATR)の野田氏は、日本の労働力人口減少に対し、シニア層の活躍が不可欠だと強調。同研究所が開発するロボット技術が、その実現を後押しすると講演しました。
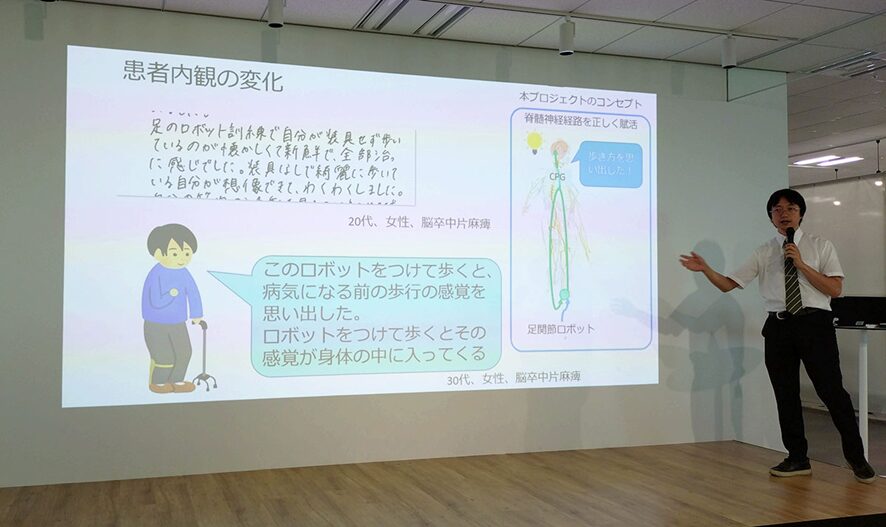
野田氏は、脳卒中患者のリハビリ支援を例に挙げ、「柔らかいロボット」の重要性を解説。これは、体内の神経系に働きかけ、病気になる前の身体感覚を再現することで、患者の回復を促します。実際に、ロボットを装着した患者からは「病気になる前の感覚を思い出した」という声が多く聞かれ、感覚が残るほど回復が進むという興味深い成果も出ています。
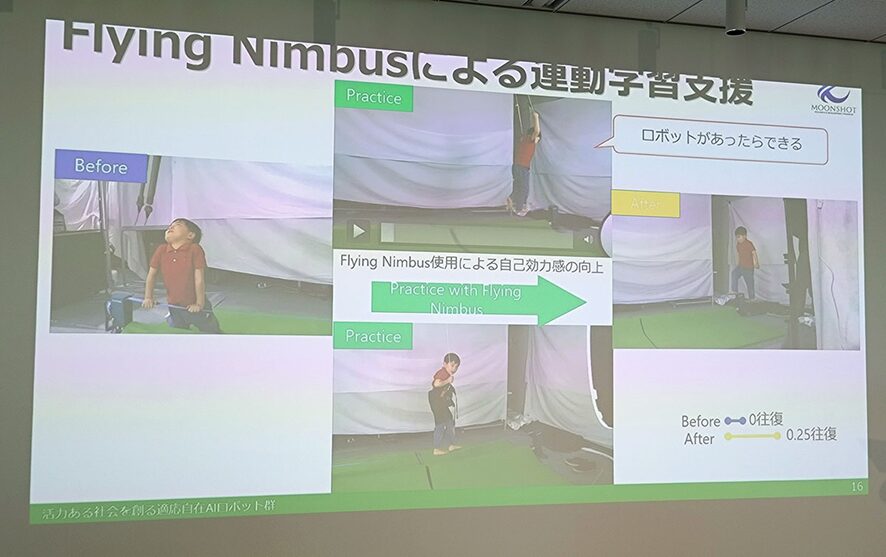
さらに、この柔らかい制御の概念を子供向けに応用した「フライイング・ニンバス」を紹介。バランス運動で子供たちが「ロボットがあったらできる!」と意欲的に挑戦し、成功体験を通じて熱中する姿を披露しました。これは、技術が「自分でできた」という成功体験を促し、学習意欲を引き出す可能性を示唆しています。
「体の感覚を残すような柔らかい制御やソフトな成功体験は自分のことのように感じる。ロボットがやってくれたではなくて、自分でやったというような感覚になって、それがすごく嬉しいと感じるようです」(野田氏)
野田氏は、ATRが目指すものがニンバス構想と合致しているとし、身体的・精神的な制約を技術と社会で乗り越えることで、シニアから子供まで、誰もが生き生きと活動できる未来の実現に貢献できると期待を表明しました。
高齢化先進国ニッポンのポテンシャルの顕在化に向けて(當山恵介・株式会社みずほ銀行産業調査部 戦略プロジェクトチーム次長)

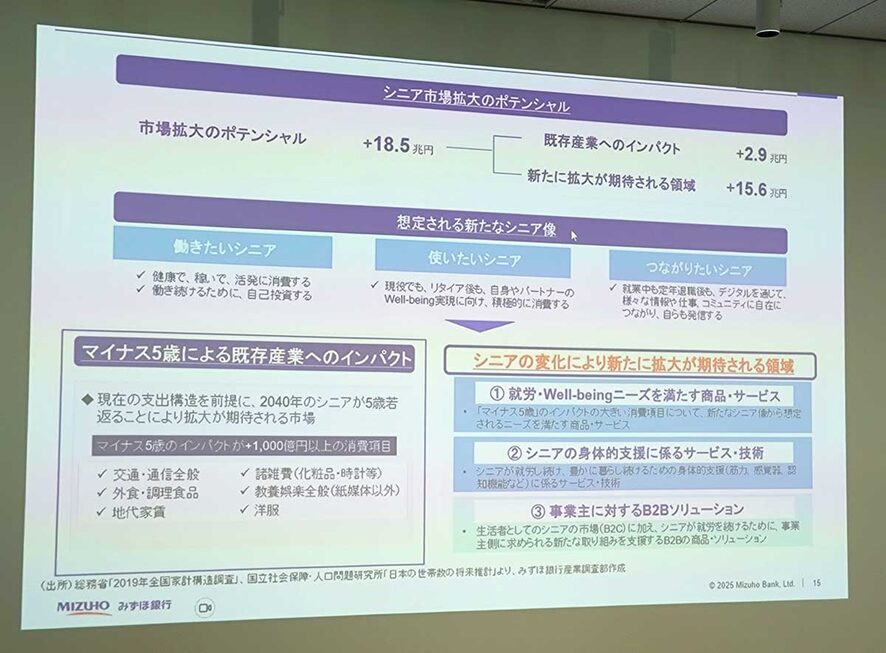
みずほ銀行産業調査部の當山恵介氏は、日本の人口減少が進む中で、シニア層のさらなる活躍が経済成長の鍵を握ると強調しました。2040年にはシニア層が約4,000万人に達し、その8割以上が自立していると指摘。健康寿命の延伸や就業意欲の高さ、また単身世帯の増加やSNSでの交流を求める「つながり志向」といった新たなシニア像を提示し、「シニアという概念を捉え直す必要がある」と訴えました。
當山氏の試算では、シニア層が「5歳若返る」ことで医療・介護費が削減され、就業による収入増や生活消費の増加が見込まれます。これにより、15.6兆円もの新たな市場が創出される可能性があり、これは日本の医薬品市場を上回る規模だと強調しました。
この潜在力を引き出すためには、シニアの身体的・精神的な制約を技術と社会で乗り越えることが不可欠であり、ニンバス構想こそがその実現の鍵となると力説しました。
「レポートを書くだけではなくて、それを実現することにこそ、価値があると思います。“マイナス5歳の世界”の実現に向けて、連携を深めていきたいですね」(當山氏)
ムーンショットチャレンジハウスの構築と展望(加藤健治・国立研究開発法人国立長寿医療研究センター ロボット臨床評価研究室 室長)
国立長寿医療研究センターの加藤氏は、次世代ロボット技術の社会実装に向けた取り組みと、未来の暮らしを支える「ムーンショットチャレンジハウス」構想について講演しました。
加藤氏は、2022年に開設した「リビングラボ」の成果を紹介。ここでは、高齢者や患者が実際にロボットを体験・評価し、開発にフィードバックする仕組みが確立されています。特に注目されたのは、転倒衝撃緩和ロボットの検証です。これは転倒時にブレーキをかけ、ゆっくり転倒させることで安全を確保するもので、実際に患者だけでなく、「介護者が患者との距離を保ち、自主性を促す訓練という挑戦」を後押ししていることが明らかになりました。この「安全が挑戦を後押しする」という発見は、リハビリの現場に新たな可能性を示唆しています。

さらに、加藤氏は、リビングラボの計測技術を病院のリハビリ現場にも展開し、転倒の瞬間や全身の筋肉活動まで詳細に解析できるようになったと説明しました。この技術は、ゴルフや卓球など、高齢者の「生きがい」や「挑戦」につながる多様な活動を支援するためにも応用が進められています。
そして、講演の核となったのが「ムーンショットチャレンジハウス」構想です。これは、空き家に最新ロボット技術を導入した「ロボットフレンドリーな家」へと改修し、実生活の場で24時間体制の実証を行うというものです。医療サービスとの連携も視野に入れ、ロボットがシニアの「健康寿命」と「生活の質」の両方を向上させる未来像を描きました。
「この構想を通じて、次世代ロボットの生活導入を加速し、ロボットと人が共生する社会の実現をめざしたいですね」(加藤氏)
CO-CREATION PARK KAWARUBA ソーシャルイノベーション共創の理念(山口潤・川崎重工業株式会社 技術開発本部)
川崎重工業の山口氏は、新共創拠点「CO-CREATION PARK KAWARUBA(カワルバ)」を通じ、社会課題解決とウェルビーイング向上を目指す事業アプローチについて講演しました。

カワルバは、川崎重工と多様なパートナーが連携し、リモート社会、少子高齢化、災害、環境・エネルギーといった複雑な社会課題に取り組む場です。特に、技術の「種」を事業として育てる「1から10」のフェーズに注力し、サービス提供時の収益化モデルまで含めた事業化を推進します。その核となるのが、人々の生活を助ける「ソーシャルロボット」です。
山口氏は、ロボットがネットワーク、AI、自律性を持つことで、「リモートワーカー」から「アシスタント」、そして「同僚・相棒」へと進化すると解説。最終的には、ロボットが人間の可能性を広げ、ウェルビーイングを支える存在となり、ニンバスのようなロボットと共生する社会を実現すると展望しました。遠隔手術ロボット「hinotori(ヒノトリ)」や病院・介護施設の配送・対話ロボット、さらには人型ロボットの活用事例を通して、その進化と社会貢献の可能性を示しました。

カワルバでは、開発から社会実装までの一貫した流れを構築し、ロボットの共通インフラ整備や、データ越境時代に対応するルール形成にも積極的に関与しています。
「川崎重工がパートナーと共に、技術開発、仲間づくり、ルールづくりを一体的に進め、ソーシャルロボットが”当たり前の存在”となる未来を創り出していきたいですね」(山口氏)
パネルディスカッション 「ニンバス」の社会実装に向けた挑戦と展望

第1部の最後は、パネルディスカッションが行われました。コーディネーターを務めたのは、川崎重工業 技術開発本部の蓮沼仁志氏。パネリストには、基調講演を行った東北大学の平田泰久教授、みずほ銀行 産業調査部の當山恵介氏、川崎重工業 ロボットビジネスディビジョンの真田知典氏が登壇しました。
ディスカッションでは、超高齢化という喫緊の社会課題に対し、AIロボット「ニンバス」がどのように社会実装され、私たちの未来に変革をもたらすのか、熱のこもった議論が交わされました。
平田教授は、ニンバスの技術が介護支援から始まったことに触れ、それが単なる高齢者支援にとどまらず、みずほ銀行産業調査部が提唱する「マイナス5歳社会」のように、若年層から高齢者まで、あらゆる人の能力を拡張し得る可能性があると語っています。
當山氏は、国内の介護ロボット市場が約3,500億円規模、グローバルでは15兆円規模に達するという具体的なデータを提示。技術革新と経済的価値の連携が、プロジェクトの拡張・実現に欠かせないと訴えました。
真田氏は、ニンバスが担うのは従来の「人減らし」ではなく、「人の能力拡張」であると指摘。川崎重工業が開発した手術支援ロボット「hinotori(ヒノトリ)」を例に挙げ、パーソナルデータを活用することで、個々に最適化された支援が可能になると説明しました。
このディスカッションでは、AIと倫理に関する課題や、AIによって人の仕事が奪われるのではという懸念についても議論が広がりました。
「ニンバスが自己効力感を高めるために“優しい嘘(ホワイトライ)”を用いる可能性があります。その倫理的許容範囲については、専門家と慎重に議論を重ねています」(平田教授)
こうした懸念に対し、真田氏は日本人の柔軟な適応力を挙げ、AIによって働き方は失われるのではなく、むしろより創造的な方向へ進化していくと展望を示しました。
「AIロボットの普及は、人間の仕事を奪うのではなく、より創造的な働き方へと進化させます」(真田氏)
ディスカッションの締めくくりに、平田教授は、たとえニンバスが形を変えても「心は同じ」であり、そうした“質的同一性”を軸に、さまざまなロボットやセンサーを接続するエコシステムの構築を目指すと語りました。
このパネルディスカッションを通じて、ニンバスは単なる技術革新にとどまらず、社会・経済・倫理といった多面的な領域に広がりを持ち、超高齢社会における人々の生きがいや社会参加を後押しする存在としての可能性が示されました。
ニンバスのデモンストレーション
第2部では様々なニンバスのデモンストレーションが行われました。
・着るロボット

日常生活を支援するソフトロボットの例として、「着るロボット」型のウェアデバイスが紹介されました。空気で膨らむ柔らかいアクチュエーターにより、半身麻痺の方でも着替えがしやすくなり、負担を軽減します。上肢だけでなく下半身の着替え支援機能も備え、介護現場での応用が期待されています。
・抱きかかえロボットアーム


人を優しく抱きかかえるために開発されたロボットアームは、内部の骨格と外側の柔らかい素材からなる二層構造が特徴です。下方向には曲がらず体重を支え、左右には柔軟に動く設計で、脇の下から腕を差し入れ優しく持ち上げます。硬さによる不快感を防ぐため、柔らかい素材も充填。今後は、脇の下にスムーズに入るよう、さらなる小型化が進められています。
・衝突回避機能付きロボットアーム
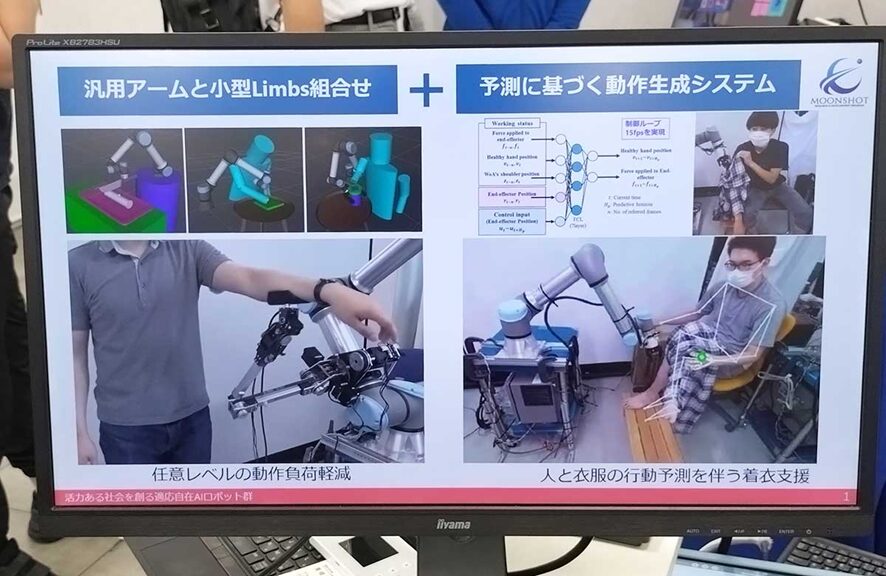
衝突回避機能を備えたロボットアームのプロトタイプで、人の動きや衝突時の力を学習し、接触直前にわずかに避けて安全に動作を補助します。現在は特定の体型や姿勢に対応していますが、今後は体格や状態の変化に応じた柔軟な対応が課題です。病院での実用化が期待されています。
・筋ジストロフィー患者支援ロボットアーム
筋ジストロフィー患者のリハビリ・介護支援のために開発された柔軟なロボットテーブルです。物を手元に運び、患者が取った後に戻る「リハビリモード」を備え、掴む動作のトレーニングを支援します。素材には劣化しにくいエラストマーを採用し、柔軟性と耐久性を両立。現在は実用化前ですが、音楽と連動する動作機能も開発中で、福祉分野での応用が期待されています。
・トイレ移乗ロボット

ベッドからトイレへの移乗を一貫サポートするロボット。運動能力のあるユーザーが自力で歩行器代わりに体重を預けて移動できます。狭いトイレ空間に対応したコンパクト設計で、ローラーと爪を使った衣類着脱補助機能も搭載。安全性と機能性を両立し、最終的に座らせる動作まで一台で完結を目指しています。
「ニンバス」が切り拓く、超高齢化社会の新たな地平
平田教授が率いるニンバス・プロジェクトは、AIとロボティクスで「活力ある社会」を実現する挑戦です。「人間中心型」ロボットという新しいアプローチは、「できない」を「できる」に、「やりたい」を行動へとつなげます。シンポジウムを通じて、その可能性と実現への確かな一歩が提示されました。