
インタビュー取材にご協力いただいた方
渡辺 哲陽 (わたなべ てつよう)氏 金沢大学 理工研究域 フロンティア工学系・教授
2003年京都大学大学院工学研究科博士後期課程修了。同年山口大学工学部助手。2006年講師。2007年金沢大学大学院自然科学研究科講師。2011年金沢大学理工学研究域准教授。2018年金沢大学理工学研究域教授となり、現在に至る。ロボットハンド、ロボット技術の医療応用、微細操作システム開発などの研究に従事。博士(工学)。
計測自動制御学会論文賞、IEEE/ASME Transactions on Mechatronics Best Paper Award Finalist、IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Best Paper Award on Robot Mechanisms and Design Finalist、IEEE International Conference on Soft Robotics Best Poster Award、SICE SI部門講演会 優秀講演、ロボティクスシンポジア最優秀賞などを受賞。
私たちは「ロボット」と聞くと、SF映画に登場する人型の機械を思い浮かべがちです。しかし現実のロボットは、工場で稼働する産業用アームや、医療・福祉の現場で人を支援する柔軟なソフトロボティクスなど、多様で実用的な進化を遂げています。
本記事では、ロボット研究の第一線で活躍する金沢大学 理工研究域フロンティア工学系の渡辺哲陽先生へのインタビューを通し、AIとヒューマノイドの現状、福祉ロボットの可能性、そして社会がこれから迎える「共生」の未来について探ります。
ロボットの「真の姿」とは? AIとヒューマノイドの意外な関係
―― 多くの人が「ロボット」と聞いて思い浮かべるのは、SF映画に登場するような人型ロボット、いわゆるヒューマノイドではないでしょうか
渡辺先生:一般的に、学生を含む多くの人は、ロボットと聞くとヒューマノイドを思い浮かべます。しかし、ヒューマノイドはあくまでロボットの一分野に過ぎません。現実には、工場で使われているアーム型の産業用ロボットや、近年注目されている「ソフトロボティクス」など、多種多様なロボットが存在します。
私が講義で教えているのは、主にマニピュレーターと呼ばれるロボットです。これはアーム型の産業用ロボットで、ヒューマノイドとは異なる分野です。一般の方が連想しがちな人型ロボットは、ロボット工学の中の一部に過ぎず、私の研究はもっと広いロボット技術全体を対象としています。
―― AIを搭載したヒューマノイドロボットは、今どのような進化を遂げているのでしょうか?
渡辺先生:ヒューマノイドロボットの進化は、ホンダの「ASIMO(アシモ)」が注目された時期以来、歴史上2度目か3度目のブームといえます。当時は「ロボットが何でもできる」と期待されましたが、実際には産業として定着せず、関心も一時的に下火になりました。
現在は、AIの導入により、運動方程式や接触モデルなどから構成される「複雑な物理モデル」を用いなくても、データの学習によって、ヒューマノイドロボットがある程度動作できるようになっています。ただし、できることの多くは今のところエンターテイメントの域にとどまっていると思っています。
その理由は、現在のAIはデータ依存性が高く、学習したデータから逸脱した想定外の状況には弱いからです。例えば、着替え支援ロボットでも、利用者が汗をかいていたり、姿勢が少し変わったりするだけでうまく動作しないケースがあります。
ロボット研究のフロンティア、手・医療・介護、そして「歩行」が拓く未来
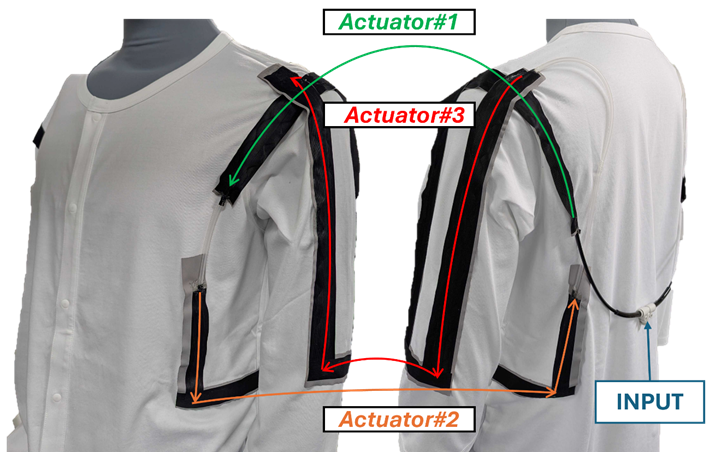
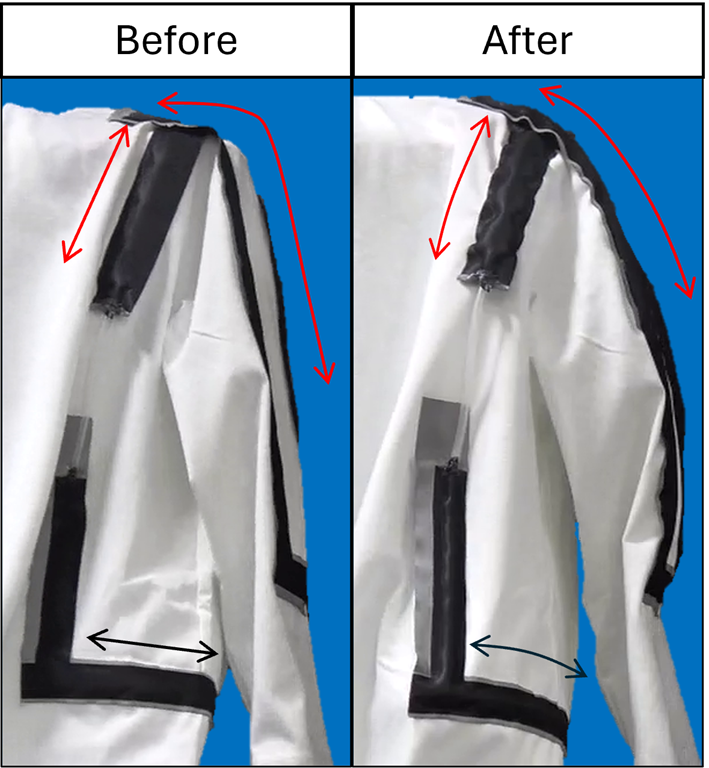
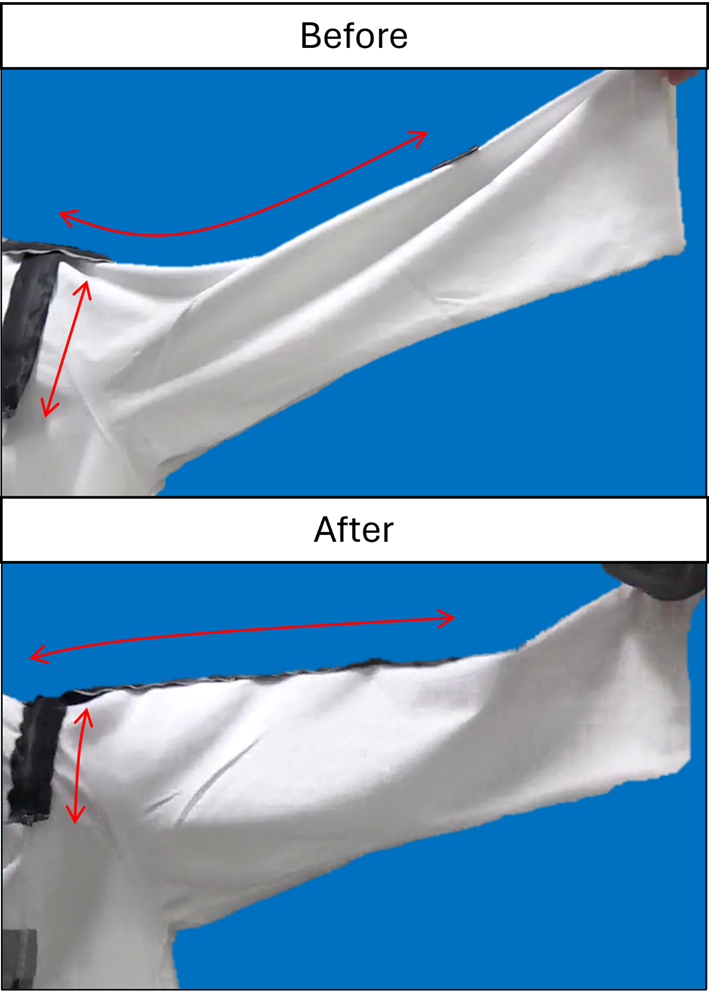

【画像】着替え支援機能を備えたソフトロボット(渡辺教授提供)
―― 先生が特に注力されている研究テーマについてお聞かせください
渡辺先生:私の研究は、ロボットハンドを使った物体操作(マニピュレーション技術)や、柔らかい素材で構成される「ソフトロボティクス」、さらに医療・福祉分野にも広がっています。脳外科医との共同研究や、看護・介護分野への応用にも深く関わっています。
―― 福祉・介護分野に関心を持たれたきっかけは何ですか?
渡辺先生:きっかけは、整形外科医との共同研究でした。間欠性跛行(かんけつせいはこう)※1という疾患の原因を解明するため、患者の歩行パターンに注目しました。当時、医師であっても歩行を定量的に観察する手法が乏しかったため、モーションキャプチャーシステム※2を導入し、トレッドミル※3上で、歩行データを計測・分析しました。
この研究で最も興味深かったのは、病気の種類によって歩行パターンが異なることが判明した点です。さらに、システムによって鑑別するよりも、各病気を模倣した歩行をプロにデモンストレーションしてもらった動画を、患者自身が見て選ぶ方が、驚くほど高い精度で自身の病気を鑑別できたことです。
特に印象深かったのは、疾患によって歩行パターンが異なり、患者自身が専門的な分析よりも、自分に近い歩き方の動画を見て病気を鑑別できたことです。この研究を契機に、高齢者と若者の歩行差や転倒予防研究などへと展開し、福祉・介護分野でのロボット技術応用の端緒となりました。
※1間欠性跛行:少し歩くと、足が痛くなったりしびれたりすることで歩けなくなり、少し休むと、また歩けるようになる病気
※2モーションキャプチャーシステム:3次元の動きをキャプチャし、その動きをデジタル化するシステム
※3トレッドミル:室内でランニングやウォーキングを行うための運動器具
福祉・介護ロボットの現状と、インフラ整備の必要性
―― 現在、福祉・介護の現場で活用されているロボットの例について教えてください
渡辺先生:代表例は、移乗サポートロボット「Hug(ハグ)」です。これは介護保険が適用され、月額レンタルで利用されています。高額ではありますが、生活支援として導入されています。
―― ロボット導入における課題と、それを解決するための取り組みは?
渡辺先生:最大の課題は「インフラ」です。多くの介護ロボットはフローリングの床を前提としているので、畳の多い日本の住宅環境では導入が難しいケースがあります。ロボットが最大限機能を発揮できるようにするには、「家のようなインフラ」の整備が必要です。
例えば、厚生労働省が支援する「リビングラボ」※4では、天井レールにハーネスを吊るしたり、センサーを配置して行動を検知したりするような住宅環境の実証が行われています。将来的には、住宅メーカーなどを巻き込んだ包括的な取り組みが求められるでしょう。
※4リビングラボ:実際の生活空間を再現し、利用者参加の下で新しい技術やサービスの開発を行うなど、介護現場のニーズを踏まえた介護ロボットの開発を促進するための機関
「三者協働」の必要性とは? ユーザー・支援者・ロボットの共存
―― 福祉・介護現場にロボットを導入するうえで、大切な視点は何でしょうか?
渡辺先生:ロボットがただ支援機能を持っているだけでは不十分です。本当に力を発揮するためには、エンドユーザー(高齢者や障がいのある方)、支援者(看護師や介護士)、ロボットの「三者協働」が欠かせません。まず、ユーザー自身が「使いたい」「使ってうれしい」と思えることが前提です。常時監視するのではなく、必要なときに的確にサポートすることが現実的であり、受け入れられやすいと思います。
―― ロボット開発者の視点に足りない点があるとすれば?
渡辺先生:一部の開発者は、自らの技術の実装が目的化し、ユーザーの自立支援という視点を見失っていることがあります。例えば、着替えを完全に代行するロボットは、利用者の運動機能を低下させかねません。大切なのは、残存機能を維持し、QOL(生活の質)を保ち、健康寿命を延ばすことです。
人口減少が進む日本では、高齢者や障害者であっても自宅から社会に貢献できるような環境を整える必要があり、そのためには自らの機能を維持し続けることが欠かせません。私が関わっている「ムーンショットプロジェクト」※5でも、自立支援を重視し、利用者が自分でできることを維持・促進するロボットの開発に取り組んでいます。
※5ムーンショットプロジェクト:多くの人々を魅了するような斬新かつ挑戦的な目標を掲げ、国内外からトップ研究者の英知を結集し、関係府省庁が一体となって集中・重点的に挑戦的な研究開発を推進するプロジェクト
「高コスト問題」はどう乗り越える?
―― ロボットは高額であり、導入コストがネックだという声もあります
渡辺先生:医療や介護現場にロボットを導入するには、たしかに費用の壁があります。例えば、介護保険が適用されるロボット「ハグ」でも月々数万円のレンタル料がかかり、一般家庭には高額です。ロボット本体の価格も自動車以上になることがあり、工場でロボットを導入する際にシステムインテグレーター(SIer)の費用がかかるように、家庭用ロボットにも専門家による設置・設定費用が必要となる可能性もあります。これらの費用は、現在の介護保険制度では到底賄いきれないでしょう。ですから、国レベルでの政策的な支援が不可欠であると思っています。
―― そうした経済的な課題を解決するためにどのような対策を行っているのでしょうか?
渡辺先生:現在、「いかに安価で、かつ利用しやすいロボットを作れるか」に注力しています。具体的には、スマートウォッチのようなウェアラブルデバイスが、手軽に導入できるロボット普及のきっかけとなるのではないかと考えています。
一般の人がロボットに対してSF的なヒューマノイドのイメージしか持たず、医療・福祉現場での具体的な課題やロボットの可能性を十分に理解していない現状も、普及を阻む要因の一つです。人々の意識を変え、介護・福祉分野におけるロボットの重要性への注目度を高め、それに伴って資金が循環する仕組みが必要ではないでしょうか。若い世代が介護・福祉ロボットに関心を持たない傾向があることからも、国が教育を通じて、高齢化社会の現実とロボットの役割を若者に伝える必要があると思っています。
ロボットは「倫理」と「使い方」が問われる時代へ
―― ロボットの普及は、社会や人々の生活にどのような変化をもたらすと期待されますか?
渡辺先生:ロボット技術によって「生産年齢」を上げ、人々が楽しく長生きできる時間を延ばせる可能性に大きな期待を寄せています。たとえ体が不自由になっても、ロボットの支援によって「生きることを楽しめる年齢」を延ばし、健康寿命と幸福寿命の両方を伸ばせると考えているのです。
―― ロボットが普及することで、懸念される点はありますか?
渡辺先生:ロボットの普及にはいくつかの倫理的な懸念があります。一つは、ロボットを身につけることで、本来できないはずの動きができるようになるという点です。例えば、片足が不自由で歩けない人がロボットの助けを借りて歩けるようになる場合、それは素晴らしいことですが、AIとの組み合わせによって、あたかも自分が本来の力で動けているかのように錯覚してしまうようなことがあります。それは「白い嘘(ホワイトライ)」となり得るでしょう。これは、一時的に良い経験をしたことで、ロボットなしでもできると過信し、無理な行動をして怪我をしてしまうといったリスクがあることです。人間の心を完璧にコントロールすることは難しいですね。このような誤認によるリスクをどう避けるかが重要な課題です。
もう一つの大きな懸念は、家庭内のプライバシーの問題です。ロボットが生活を支援するために、家に設置されたセンサーやカメラが利用者の行動をデータ化するようになると、トイレやお風呂といったプライベートな空間での映像や情報も記録されることになります。監視カメラの普及と同様に、プライバシー侵害の懸念や、データの悪用といったリスクを生む可能性があります。特に若い女性などの場合、そのリスクはより顕著になるでしょう。これらのデータをどう安全に管理し、利用者のプライバシーを保護するかが、今後のロボット開発における喫緊の課題ですね。善悪を判断すること自体が難しいのですが、技術開発と並行して社会全体で議論し、解決策を見出していく必要があります。
介護ロボットの「賢い進化」 高コストの壁を壊し、誰もが笑顔になる未来へ
―― 企業や他機関との共同研究について、現在取り組まれていることや、今後期待されることがあれば教えてください
渡辺先生:医療・福祉分野における企業との共同研究は、現状では難しいですね。理由は、この分野の市場規模がまだ小さく、ユーザー側が高価なロボットを購入する経済的余裕がないため、企業が多額の投資をしてまで参入するメリットが少ないからです。しかし、高齢者の中でも比較的経済力のあるアクティブシニア層へのアプローチや、看護師や理学療法士といった他分野の研究者との共同研究には可能性があると考えています。実際に、私の研究室では、「ムーンショットプロジェクト」で開発している衣服型ロボットを応用し、パーキンソン病患者の立ち上がり支援に関する共同研究も進めています。
―― 医療・福祉ロボットの市場規模を拡大するにはどのようにすべきでしょうか?
渡辺先生:医療・福祉ロボットの市場規模を拡大するためには、対象を高齢者や障がいのある方に限定せず、若い世代を含む一般の人の「ちょっとした困りごと」を解決する方向へ視野を広げることが重要です。例えば、パーキンソン病患者の立ち上がりを助ける衣服型ロボットは、立ち上がる瞬間に骨盤を軽く押す「ライトタッチ」によって、スムーズな動作を促します。これは、体を強く支えるのではなく、脳が普段使わなくなった筋肉を刺激し、適切なタイミングで「動け」と合図を送るようなものです。この技術は、パーキンソン病患者だけでなく、膝や腰に不安を抱える一般の人にも「楽になった」と好評でした。
例えば座りっぱなしの仕事で腰痛に悩む人に対して、単に痛みを和らげるだけでなく、正しい姿勢を促し、筋力を維持・強化するようなロボットが求められるでしょう。これは、ロボットが単に動作を代行するだけでなく、利用者が自ら体を動かすことをサポートし、機能の維持・向上を促すという、「自立支援」の考え方にも通じます。日常生活に溶け込むような手軽なロボットから普及を始め、医療・福祉ロボットへの関心と理解を深めていくことで、将来的に市場全体が活性化することを期待しています。
―― 最後に読者の方に向けてメッセージをお願いできますか?
渡辺先生:人々の健康寿命や幸福寿命を伸ばすような、安価なロボットの開発を目指しています。ロボットが高価である主な理由として、まず開発コストがあります。中国製のロボットが安価なのは、政府が開発資金を投入し、その分のコストが製品価格に上乗せされにくいからです。日本でロボットの価格を下げるためには、まず材料費を削減すること、そして部品点数を極力減らすことが重要です。モーターなどの駆動部品もできる限り少なくすることで、全体のコストを抑え、よりシンプルで製造しやすい設計ができます。
日本は今後、高齢化がさらに進み、計算上では人口の約37%が高齢者になると予測されています。これが意味することは、約3人に1人が高齢者となることです。このような社会を支えるためには、医療・福祉産業を社会全体で盛り上げていくことが欠かせません。この分野への「投資」が増えれば、介護事業者や介護に携わる人々の待遇が改善され、ひいては人手不足の解消にもつながるでしょう。この未来を共に築いていきませんか。
渡辺 哲陽先生のご紹介リンク:
– 渡辺 哲陽 | 金沢大学 研究者情報